Det har inte blivit så mycket gjort på banan den sista tiden. Det enda som har hänt var att jag byggde en variant av en transistorstyrning för handtagen, som baseras på t.ex.
http://www.abslotsport.com/page64.html. Jag fick en del hjälp med att ändra den för att passa 1 kohm potentiometrar i stället för 10 ohm. När jag testade på min bana blev det snabbt tydligt att det var mycket svårt att ställa in den optimalt. När jag berättade detta för min kollega började han att fundera … Efter några dagar kom han tillbaka med en idé. Han hade lagt till en operationsförstärkare. (Jag vet knappt vad det är och ännu mindre hur den fungerar …). Det han inte var riktigt nöjd med i den gamla lösningen var att den kräver lågohmiga potentiometrar, som måste tåla höga effekter, då det går ganska stora strömmar i kretsen. Det var tydligen en lösning som inte var tillräckligt ”elegant”.
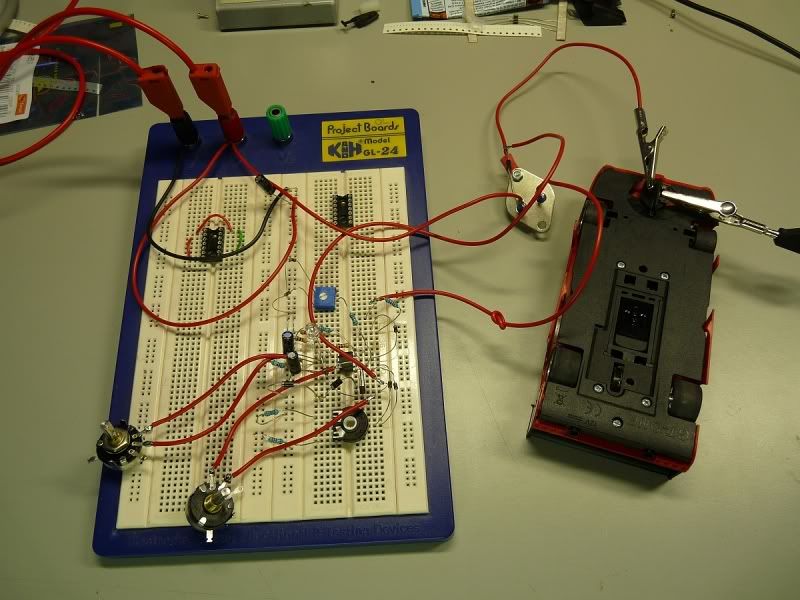
Efter lite testande har vi nu en fungerande koppling på en labbplatta. Den syns i följande bild. Den använder fortfarande samma transistor som den ursprungliga (den stora ”klumpen” närmast bilen). Det finns 4 potentiometrar i bilden, där den lilla blåa (50 ohm) simulerar handtaget (den tål inga stora effekter, så strömmen är begränsad). Den längst till vänster styr återkopplingen till operationsförstärkaren. Den svarta trimpotentiometern till höger ställer ”start offset”. Dessutom tillkommer det ytterligare en potentiometer i stället för ett fast motstånd och man kan då ändra ”lutningen” på responskurvan.
Den är även komplett med bromsfunktion. Den är statisk i den nuvarande kopplingen, men den kommer att bli ställbar på samma sätt som i den första lösningen (ett gäng dioder som kopplas in via en vridströmställare). Potentiometern längst ner i bilden gör det möjligt att ställa in ”bromspunkten”. Vi har lagt till en LED (lysdiod), som hjälper till vid inställningen av bromspunkten. (För mycket och bromsen är på hela tiden, dvs. LED:en lyser konstant, och det går en ganska stor ström i kretsen.) När bromsen aktiveras lyser LED:en en kort stund.
När vi har testat på bänken får man en mjuk styrning av motorn med stor dynamik.
Vi har använt dessa två bilar när vi har testat. De motsvarar troligen ytterligheterna i min samling.

Toyotan har en Scaleauto ”black can” med ca 29 krpm medan Ninco Jaguaren har en NC1.
Vilken vecka som helst skall jag koppla in ett riktigt handtag till kretsen och ansluta till banan, så att jag kan göra riktiga tester med ett (stort) antal bilar.
/Claes



















